… ja virhekin löytyi koodista. Edellisen viestin toteutuksella signaalipuskurin pitää olla saman mittainen kuin kerroinjonon, muuten laskennassa käytetyt indeksit ajautuvat pois tahdista. Tämä ei siis ole mikään suotimen edellytys, vaan yksinkertaisesti tuon kirjoittamani toteutuksen heikkous. Mutta ei muuteta sitä nyt tähän hätään - säädin vain signaalipuskurin samaksi 16 näytteen pituiseksi kuin kerroinjonokin.
Nyt suodatin käyttäytyy kauniisti ja antaa varsin hyvin samat lukemat kuin suunnitteluohjelmakin. Ohessa vielä Iowa Hillsin FIR-designerin käsitys asiasta:
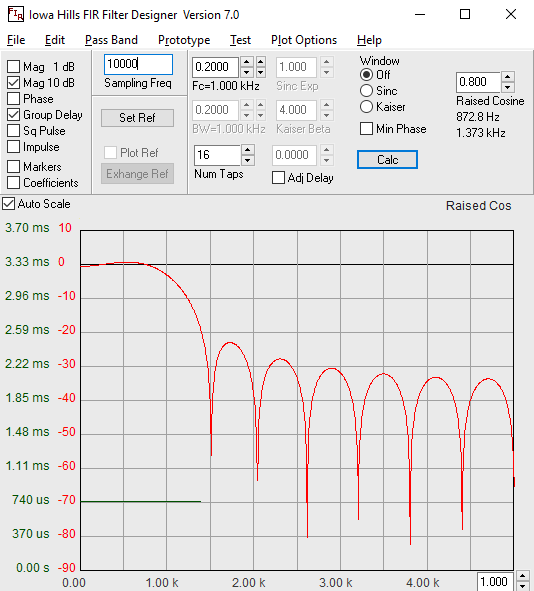
Skoopilla mitattuna suotimen vahvistus kulmataajuudella 1kHz on -3,25 dB mikä vastaa oikein hyvin teoreettista arvoa (-3,0 dB). Myös kampa rajataajuuden yläpuolella osuu hienosti ennustetuihin arvoihin muutaman desibelin tarkkuudella.