Törkeen siisti härveli, ja Helsingin Hacklabilla on muutenkin ollut tarkoitus piipahtaa joskus, niin voisin tulla avuksi. Osaamista löytyy jonkin verran kaikilta osin.
@rambo@Lapm onko tarkempaa koordinointia viikonlopulle, mihinkä aikaan jengiä menossa paikalle? Itse tulossa ekaa kertaa Helsingin hacklabille, toki muuten kokemusta vastaavista tiloista Design Factory / makerspace kulmilla.
Ei ole sovittu vielä tarkemmin. Katsotaan mitä ihmiset on mieltä. Pari päivää tässä aikaa vielä.
Sinänsä ongelma kun suurin osa taitaa olla avainjäseniä, minä mukaan lukien, niin sisälle kyllä pääsee.
Rambo taitaa olla se tärkein henkilö, kun tuntee simulaattorin toiminnan meistä parhaiten.
Noin 40 minuuttia menee matkaan kun autolla tulen tällä kertaa. Katsoo sitten mahtuuko pihaan vai viekö liityntä parkkiin. Jos joku sattuu reitille niin ettei ihan mahdoton mutka tule niin voin tarjota kyytiä. Google Maps kertoo parhaaksi reitiksi Kerava - Tuusulanväylä - Kehä 1 - Pitäjänmäki - Hacklab. Tuota voi sitten säätää hiukan tarpeen mukaan.
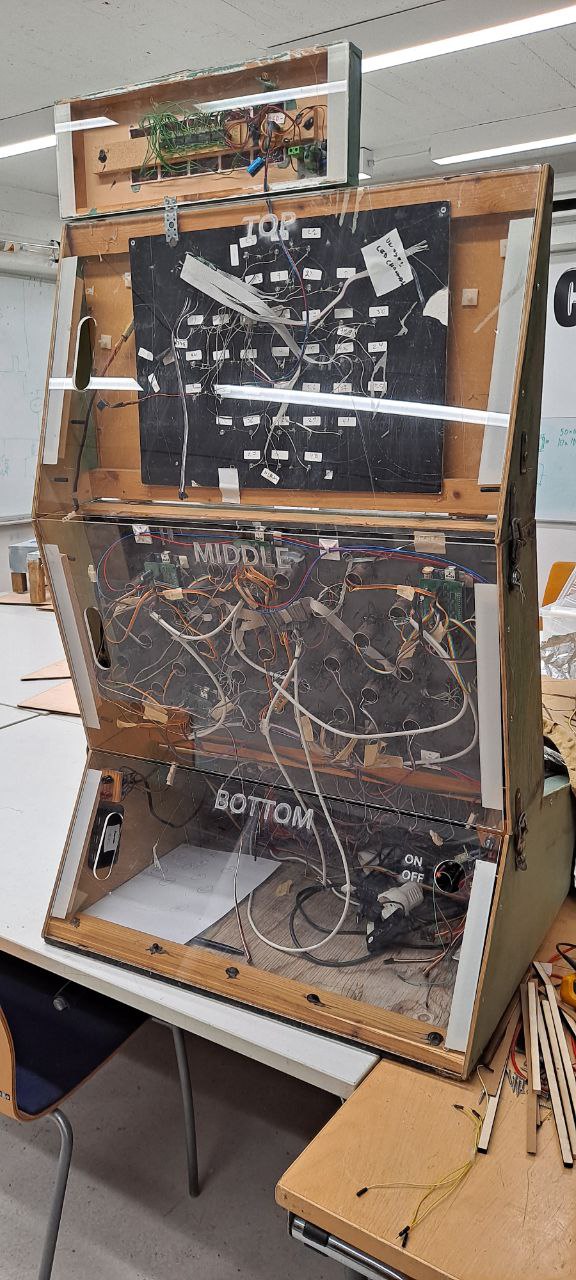
suojaplexit takapuolelle tehty (niistä ylintä voi vielä parantaa siten että laseroi siihen reiät niihin paikkoihin joissa kytkimet yms ottaa kiinni kun taitettu kuljetustilaan
USB-sarjaporttien konteille antaminen on suht triviaali ongelma (samoin kuin se että portit nimetään aina laitteen sarjanumeron mukaan niin kytkemisjärjestys ei vaikuta nimeen)
Alumiinipaperia ja teippiä haettu, ken joutaa saa liimata (puuliima toimii loistavasti) paperi kannen pohjalevyihin, jos/kun pitää jatkaa niin muista taittaa reuna ympäri ja sitten alumiiniteipillä päälle. Aluteipistä kanssa aina joku kulma (tai pari) ympäri koska liimapuolen sähkönjohtavuus on huono.
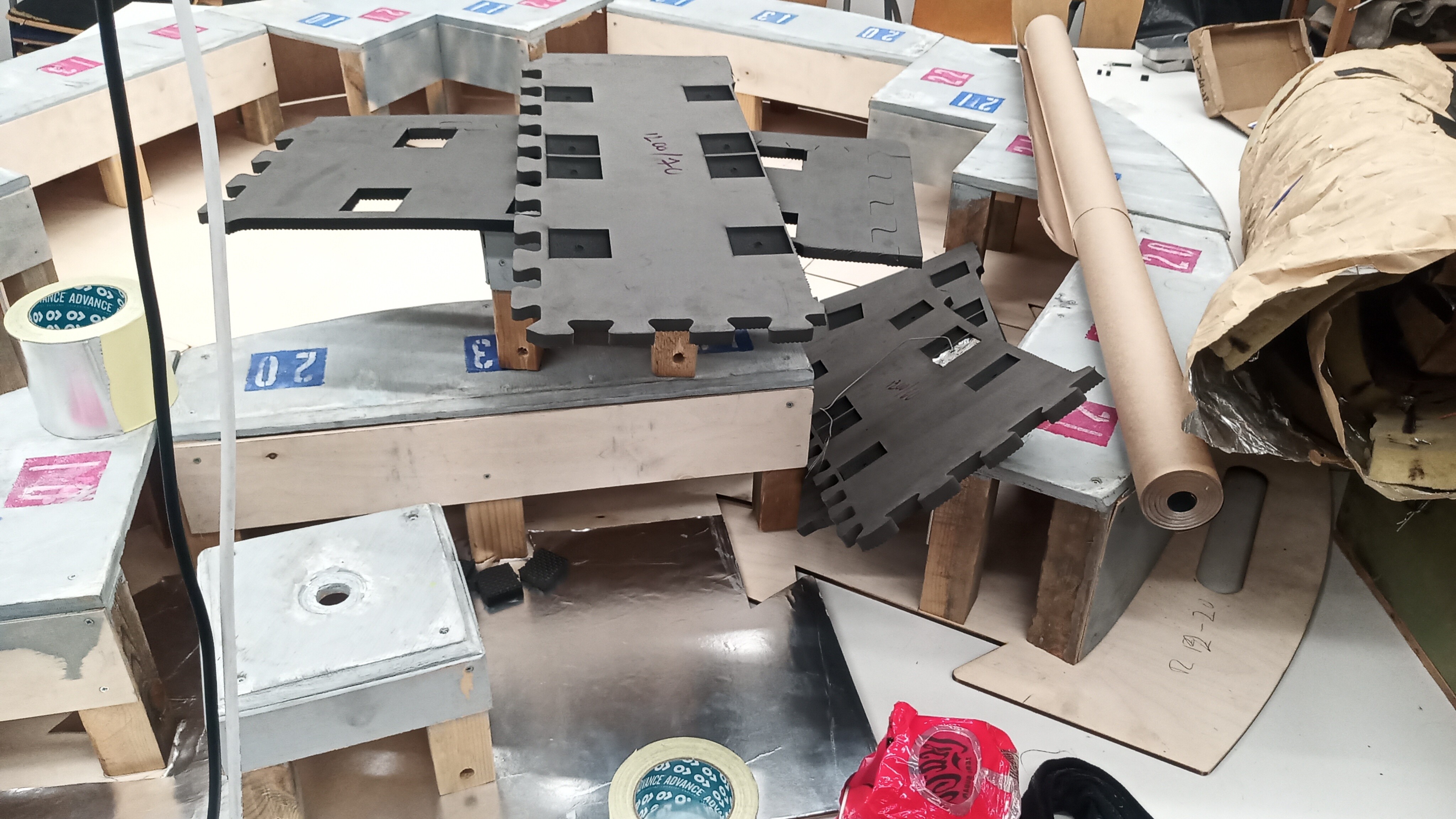
Tanssimattoon on ratkaisu, laserilla kaiverretaan solukumimatosta pois jalkojen alta niin saadaan “membrane kytkimet” tehtyä, samalla saa kaiverreltua johdoille vedot yms. Olen tässä iltaa pitkin tehnyt muutamia koepaloja läbiltä löytyneillä biltema solukumeilla, Jos haluaa niin saa mielellään hakea tuntumalta optimaalisen kaiverruksen ja mahdollisen stäkkäyksen.
Folion liimaaminen pohjaan on edistynyt (kiitos @ExTechOp ), seuraavaksi pohja pitäisi laittaa takaisin kasaan ja mitata parin millin tarkkuudella kehän sisäpuolisten jalkojen paikat jotta tanssimaton laserleikkauksen voi suunnitella.
Se “tanssimaton” suunnittelu olis nyt päähomma, sitä varten tarttis tosiaan tarkat mitat noista jalkojen paikoista, otin pinon valokuvia ja saan niistä ehkä AliceVision:illa koostettua 3D mallin mutta jonkun:tm: pitäis varmistaa että sen mitat oikeasti vastaa todellisuutta.
Lisäksi yksi treenimaton pala pitäisi leikata tarkasti neljään osaan jotta noi pari vajaaksi jäävää kulmaa saadaan katettus
Matto on asemoitu näin jotta mikään sauma ei jäisi jakkaran jalan alle.
edit: täysin siivoamattomat meshit suoraan AliceVision Meshroom:ilta Dropbox - Error - Simplify your lifeDropbox ne eivät myöskään ole missään tietyssä mittakaavassa, joku selkeä mitta pitää tarkistaa ja skaalata meshit sen mukaan.
Tuossa vielä kuva “suojaplekseistä”. Alinpaan pitää myös lisätä vielä reikä (tai mielummin lovi reunaan, niin kansi ei ole “kiinni” johdoissa) virtajohdoille, jahka uusi virtalähde on kiinnitetty paikalleen.
Oli kiva tutustua HackLabiin ja kontributoida projektiin. Mukavaa porukkaa myös!
Mä olen nyt viikon metsässä, maton saa mittailla ja (laser) leikellä silleen että saumoja ei tule jakkaroiden jalkojen kohdille. Kaiverrusparameterit on esimerkkipalassa ja laser-koneella on reaktori-kansiossa lightburn tiedostoja joista yhdessä on noita kaiverruskokeita mutta sinänsä simppeli, 50mm x 50mm neliöitä jakkaran kulmiin, yksi sivu on teoriassa 20cm pitkä. Johdoille kannatta leikata urat (koska kaivertaminen on hidasta). Maton reunat saa mennä jonkin verran kehän alle johon liittyy tuo yllä puhumani puhe kehän jalkojen paikkojen mittauksesta.
Konsolin sisällä olevassa pussukassa on 5pin “jatkojohtoja” jotka voi laittaa poikki ja sillä tavoin saada molemmat puolet liitintä johtoihin. Lisäksi pinossa on multicore-johtoa jolla saa jakkaroiden johdot vetää yhteen paikkaan. Siellä on myös nucleo johon voi heittää vanhan mega softan niin ei tarvitse tehdä mitään peruuttamatonta vanhalla asennukselle ennen kuin uusi on testattu.
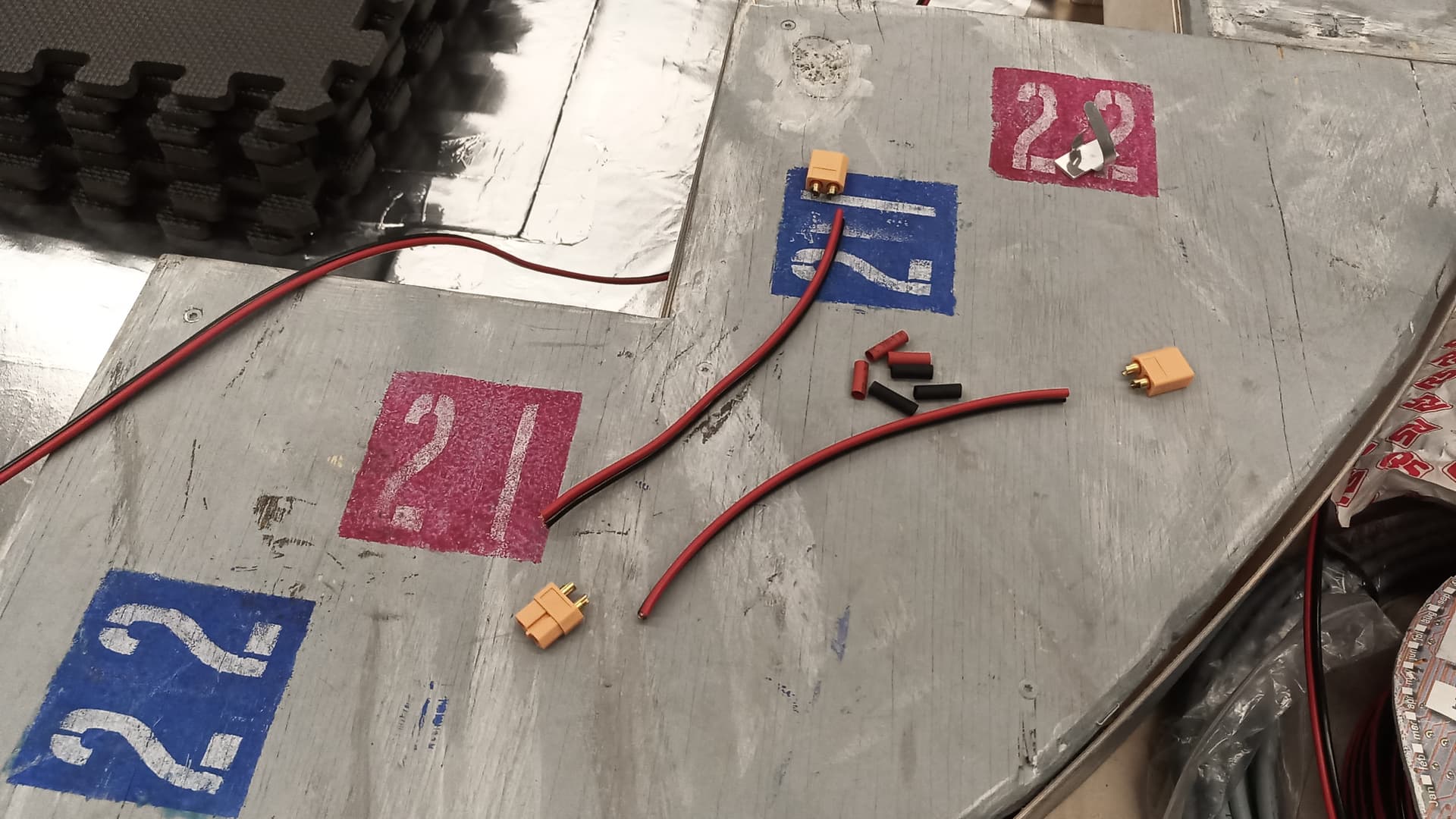
Samoin jos jaksaa / joutaa niin kehän ympäri voi vetää yhden “powerplanen” sillä paksulla mustapunaisella kaapelilla, pussissa on XT60-liittimiä, joka palapelin rajalle liittimet (niistä saa myös ottaa erillise lähdöt vaikka wago-liittimiin että ei tarvitse käyttää enempi XT60 liittimiä kun haluaa sähköä johonkin (esim valoille).
powerplane on edistynyt sen verran että XT60 “jatkojohdot” on tehty, vielä pitäis tehdä niihin tapa haarukoitua vipu-wagoon josta sais sitten sähkön tarvitisijoille tehoa.
Tanssimaton mallinnus on myös edennyt lisää F360 tanssimatto nyt pitäisi olla pohjatyöt tehty että voi vihdoin piirtää ne oikeat DXF:t joiden perusteella matot leikataan ja kaiverretaan.
No ei se ihan putkeen mennyt, osittain siksi että omat muistikuvat oli vääriä (hiukan saatettiin kytkeä 5V jännitteessä olevaa piikkiä maahan, jotain puoliturhia traceja saattoi poistua…) ja osittain siksi että liian hieno ATX-virtalähde ei suostunut elämään epätasaisten kuormien (about kaikki kuorma 3.3V railissa eikä 12V kuten normaalisti) kanssa.
Anyway, ne aircoret pitää nyt johdottaa kokonaan uusiksi ja siististi. Huomio! Nimeän maaston: Kun USB-liitin on ylöspäin, ison konkan alla on 2 piikkiä kolvattu solder-jumperiin,oikeanpuoleinen piikki on aircorejen ajojännite, 3.3V tai joku sopivasti alle jos sattuu olemaan säädettävä virtalähde. Näistä vasemmalle on shieldiin kolvattu 2 piikkiä lisää ne ovat 5V arduinolle ja maa joka on yhteinen. Yhdessä shieldissa oli tracet repeytynyt irti joten ison konkan jalkoihin on kolvattu johdot, punainen on ajojännite.
Samoin kaikki “railit” olis syytä tehdä siten että johdot ovat valmiiksi riittävän pitkiä että ei tarvitse irroitella liittimiä kun paketti taitellaan kokoon (tosin I2C:n osalta asiaa on pikkasen paha välttää kun se on jo merkittävästi liian pitkä veto muutenkin). Ei ole mikään pakko käyttää sitä jäykkää puna-mustaa kaapelia, itseasiassa olis suorastaan hyvä jos joku hakis motonetistä tms silikonikaapelia (extrajoustava, very nice) joka olis hiukan järjellisemmän paksuista tarpeisiimme. 3.3V:tä menee joku 4-6A ja 5V:tä korkeintaan 2A.
Ja ennenkuin kukaan innostuu heittämään sitä vanhaa “tanssimattoa” pois. 1. siellä on sisällä Arduino Mega ja savukoneen ohjaukseen liittyviä asioita jotka tarvitaan takaisin vähintään referenssiksi 2. Sitä ei todellakaan hävitetä ennen kuin uusi versio on testattu toimivaksi.
Uusi matto tarvitsee lisäksi vielä liittimet ja vedot kontaktipadien johdoista (jotka tehtiin assyillä, kiitos osallistuneille) käyttöön varaamallani multicore-johdolla yhteen paikkaan jossa ne voidaan MCU:lla lukea (rs-pussissa on nucleoita, niissä on riittävästi pinnejä tähän).
Itse olen Chaos Communication Camp moodissa seuraavat 3 viikkoa, voi kysellä esim täällä mutta en ole labilla paikanpäällä ohjaamassa tai tekemässä.